Door: Redactie - 24 februari 2023 |

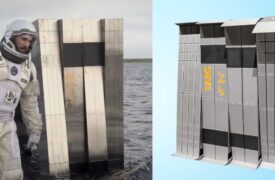
Deze radiogestuurde onderzeeër kan een constante diepte of een bepaalde afstand tot de bodem aanhouden. De onderzeeër is uitgerust met een druksensor en een laserafstandssensor. Voor de automatisering van de radiogestuurde onderzeeër worden een Raspberry Pi en PID-regeling ingezet. Het apparaat is uitvoerig getest, zowel in een zwembad als in een kleine rivier, zoals te zien is aan het einde van de video.
In de hedendaagse technologische en innovatieve wereld, neemt de radiogestuurde onderzeeër een cruciale positie in voor het realiseren van verschillende onderwateractiviteiten. Dit instrument is specifiek ontwikkeld om een stabiele diepte aan te houden of een vastgestelde afstand tot de zeebodem. Het is voorzien van zowel een druksensor als een laser-afstandssensor. Deze zijn essentieel voor de automatisering van het apparaat, mogelijk gemaakt door een Raspberry Pi en PID-regeling. Er is uitgebreid getest met dit apparaat, onder andere in een zwembad en een kleine rivier. De resultaten hiervan zijn te bekijken aan het einde van de video.
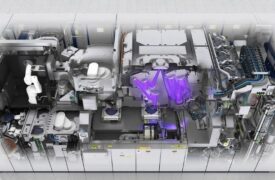
De verplaatsing van de radiogestuurde onderzeeër bedraagt 2,4 kg en de testdiepte is 1,5 meter. De romp is gemaakt van een acrylplastic cilinder met een afmeting van 250x110x3mm en een SAN-plastic deksel van 2 mm dik. Het deksel is afgedicht met een 2,5 mm dikke o-ring van NBR 70 shore. De ballasttank bestaat uit een 60 ml spuit, welke functioneert als een marinade-injector van het merk Eotia. Deze is aangedreven door een Lego EV3 Medium Servomotor, met het modelnummer 45503.
De voorwaartse schroef betreft een drone-propeller, namelijk de Diatone Bull Nose 4×4.5. Deze wordt aangedreven door een specifieke motor: de Lego PF L-motor, modelnummer 88003. Aan de andere kant is er ook een draaipropeller. Deze is van Lego en heeft drie bladen, het modelnummer hiervan is 6041. Ook deze propeller wordt aangedreven door een Lego motor. In dit geval gaat het om de Lego PF M-motor, met als modelnummer 8883. De magnetische koppelingen bestaan uit een K&J Magnetics D38-N52 neodymiummagneet, TapeCase 423-5 UHMW-tape en siliconenspray. De motor is aangedreven door twee Pololu 2130 DRV8833 Dual H-bridge motorstuurprogramma’s.
De radiobesturing is een 27 MHz-controller, gedemonteerd van een niet-gelabelde Chinese Mini U-boot. De druksensor is een Honeywell SSCMANV030PA2A3 2 bar sensor, en de laser-afstandssensor is een SparkFun TFMini-S Micro. De computer aan boord van de radiogestuurde onderzeeër is een Raspberry Pi Zero 2 W en de voeding is een Lego oplaadbare batterijdoos van 9V (8878) met een Pololu 2123 S7V8F5 5V spanningsregelaar. Ten slotte is de camera aan boord een RunCam 5 Orange.
Lees ook:
Dit artikel delen op je eigen website? Geen probleem, dat mag. Meer informatie.

IndustrieVandaag is een onafhankelijk platform met het laatste nieuws van vandaag over de procesindustrie, industrial processing, productie industrie, maakindustrie en elektronica industrie.
Neem contact met ons op:
Tel +31 (0)23 737 07 63
Email via contactpagina