
Door: Redactie - 13 september 2023 |
In de moderne wereld waarin we leven, worden we geconfronteerd met talloze uitdagingen op het gebied van energie en milieu. Een van de meest dringende problemen is het aantal ernstige ongelukken in de mondiale olie- en gasindustrie als gevolg van beschadigde pijpleidingen. Onderzoekers aan de University of Houston pakken dit probleem aan door het ontwikkelen van een autonome onderwaterrobot die potentiële lekken en structurele defecten in pijpleidingen kan identificeren.
Elk jaar vinden er duizenden olielekkages plaats in internationale wateren. Hoewel de meeste klein zijn, kan gemorste ruwe olie nog steeds schade aanrichten aan kwetsbare gebieden zoals stranden, mangroves en wetlands. Grotere lekkages wijzen vaak naar pijpleidingen als hoofdverantwoordelijke. De tijdige inspectie van subsea-infrastructuur is essentieel om dergelijke rampen te voorkomen. Hoewel huidige inspectietechnieken geavanceerd zijn, hebben ze vaak een goed opgeleide duiker nodig. Bovendien kosten deze technieken veel tijd en geld. Dit is vooral het geval wanneer het inspectiedoel zich diep onder water bevindt.
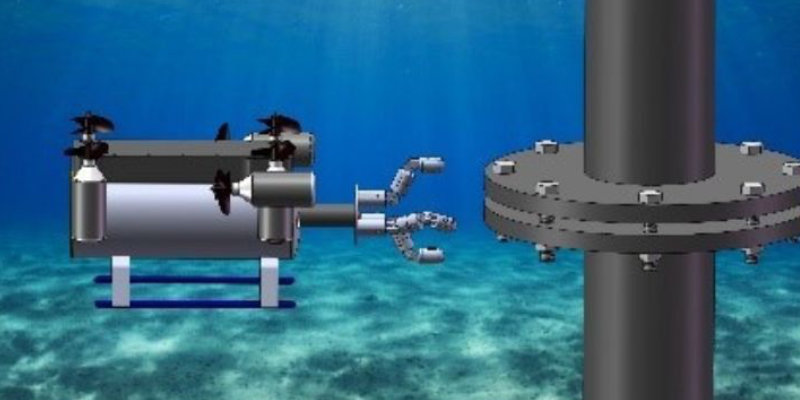
Het SmartTouch-project van de University of Houston betreft onderwaterrobots, oftewel Remote Operated Vehicles (ROVs), die zijn uitgerust met stress wave-based smart touch sensoren, videocamera’s en scanning sonars. Deze ROVs kunnen langs een subsea pijpleiding zwemmen om flensbouten te inspecteren. Volgens het Bureau of Safety and Environmental Enforcement hebben problemen met boutverbindingen het aantal pijpleidingsongevallen dat resulteert in lekkages versneld.
De BSEE financiert deze geavanceerde technologische ontwikkeling. Vervolgens voeren UH-onderzoekers Zheng Chen en Gangbing Song het project uit. Daarbij werken ze nauw samen met Oceaneering International en Chevron. Zheng Chen benadrukte dat het automatiseren van het inspectieproces met deze onderwaterrobot leidt tot een sterke vermindering van de kosten en risico’s van subsea-inspecties.
Olie- en gaspijpleidingen kunnen om diverse redenen falen, variërend van apparatuurdefecten en corrosie tot weersomstandigheden en scheepsgerelateerde ongevallen. Gangbing Song, die aanzienlijk onderzoek heeft gedaan naar op piezoelectriciteit gebaseerde structurele gezondheidsbewaking, benadrukte het belang van nauwkeurige corrosiemonitoring. Zijn eerdere onderzoekinspanningen omvatten tal van schadedetectietoepassingen.
De samenwerking tussen UH en Oceaneering International, een industriële leider in ROV-ontwikkeling en Chevron, een grote olie- en gasoperator, is een teken van het vertrouwen in deze technologie. Chevron zal de toekomstige commercialisering van de onderwaterrobot technologie evalueren.
Volgens de onderzoekers zal de SmartTouch-oplossing de deuren openen voor de inspectie van andere soorten subsea-structuren. Het vormt een ontwerpsjabloon voor toekomstige robottechnologieën. “Dit project zal de grenzen verleggen van wat kan worden bereikt door robotica en structurele gezondheidsbewakingstechnologieën te integreren”, voegde Chen toe.
Lees ook:
Dit artikel delen op je eigen website? Geen probleem, dat mag. Meer informatie.

IndustrieVandaag is een onafhankelijk platform met het laatste nieuws van vandaag over de procesindustrie, industrial processing, productie industrie, maakindustrie en elektronica industrie.
Neem contact met ons op:
Tel +31 (0)23 737 07 63
Email via contactpagina










