
Door: Redactie - 9 januari 2023 |
De koppeling van mechanisch en logisch vision-based grijpen is nu heel eenvoudig. De automatiseringsspecialist SCHUNK heeft de 2D Grasping kit ontwikkeld voor het hanteren van afzonderlijke objecten die willekeurig in een vlak zijn gerangschikt. Het hart van dit intelligente systeem is de in eigen huis ontwikkelde AI-software, die vooraf is geïnstalleerd op SCHUNK’s eigen industriële pc (SVC). Het volledig op elkaar afgestemde pakket van hardware, software en service komt uit één hand en staat open voor alle robots.
Individuele, willekeurig gerangschikte en niet-gepositioneerde onderdelen van een transportband, bak of stellingtafel verwijderen, is een gebruikelijke handeling in talloze industriële productieprocessen. Ze worden dan meestal verder verwerkt, gescheiden of naar een machine gebracht – handmatig of automatisch. Geautomatiseerde handling met behulp van robots, grijpers en vision-systemen is veeleisend en vereist ervaring op het gebied van beeldverwerking, belichting en procestechnologie. Met de 2D Grasping Kit biedt SCHUNK nu een complete oplossing die het veel eenvoudiger maakt om te starten met geautomatiseerd vision-based grijpen van objecten. Gebruikers kunnen het plug-and-play, op vision gebaseerde systeem gemakkelijk integreren en de automatisering meteen inzetten. Vooral bedrijven die nog in de beginfase zitten van de automatisering van hun productieprocessen zullen hiervan profiteren. Er is geen voorafgaande kennis van programmeren of beeldverwerking vereist. De volledige compatibiliteit van alle componenten onderstreept het voordeel voor de gebruiker.
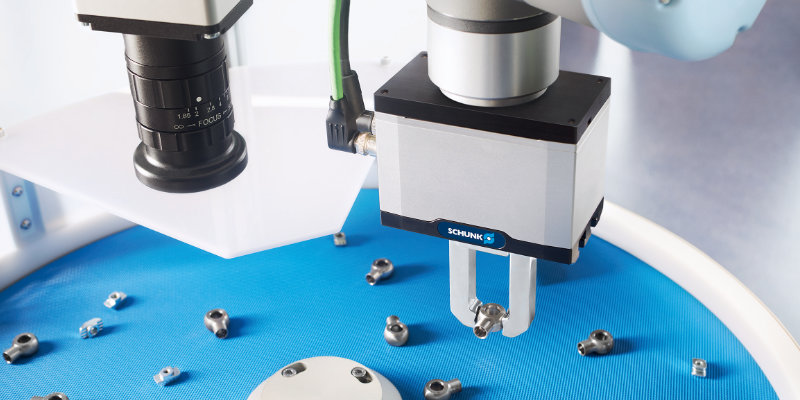
Na de MTB-toepassingskits – voor eenvoudige gedeeltelijke automatisering van het beladen en ontladen van machines – is de 2D Grasping kit een vervolgmodule waarmee de automatiseringsexpert SCHUNK een concrete oplossing biedt voor meer efficiëntie en productiviteit. De kit combineert intelligente objectherkenning en flexibel grijpen met intuïtieve bruikbaarheid en kan worden aangepast aan de respectievelijke eisen van de klant. Deze volledig gecoördineerde automatiseringsoplossing voor het vision-based grijpen en plaatsen van niet-positiegeoriënteerde werkstukken bevat een camerasysteem inclusief lens, een toepassingsspecifiek grijpsysteem, SCHUNK’s eigen industriële pc (SVC) en een plug-in voor eenvoudige integratie in de robotbesturing. De kern is de door SCHUNK ontwikkelde AI-software, die zorgt voor betrouwbare herkenning, ook bij wisselende lichtomstandigheden. Alle componenten van de kit zijn perfect op elkaar afgestemd en procesveilig.
Het camerasysteem detecteert betrouwbaar werkstukken op een bepaald niveau, zelfs bij moeilijke lichtomstandigheden, en berekent mogelijke grepen inclusief een botsingscontrole. De werkstukken hoeven niet meer vooraf gesorteerd of gepositioneerd te worden; de gebruiker kan zijn eerdere processen behouden. Tijdens werkstukdetectie wordt AI gebruikt om te zoeken naar eerder gedefinieerde objecten. De software gebruikt de interferentiecontouren van de vingers en het eerder in de software gedefinieerde werkstuk om te berekenen hoe het werkstuk in het gedefinieerde werkgebied kan worden gegrepen zonder te botsen. Na herkenning worden botsingsvrije handgrepen en naderingspunten binnen enkele seconden automatisch berekend en naar de robot overgedragen. Hier heeft SCHUNK zijn decennialange ervaring in geautomatiseerde gripplanning geïntegreerd.
De gebruiker kan de 2D Grasping Kit integreren in verschillende robots of cobots, ongeacht de fabrikant, met behulp van kant-en-klare softwaremodules; SCHUNK levert de juiste plug-in voor de robot in een kit. In de gesprekken met de klant en bij het bepalen van hun behoeften wordt een combinatie op maat van de toepassing samengesteld en goedgekeurd. Afhankelijk van de grijpsituatie kunnen voor elk type cobot geschikte grijpers worden gecombineerd: elektrische, magnetische, adhesie of pneumatische grijpers. Met behulp van de maat- en -berekeningsassistent voor de grijpers van SCHUNK en een realistische validatie in het CoLab-robottoepassingscentrum, kan precies worden nagegaan hoe goed de geselecteerde grijper de werkstukken kan vision-based grijpen voordat deze wordt ingezet.
Met de 2D Grasping Kit kunnen gebruikers uit vele branches pick & place-toepassingen van willekeurig gerangschikte onderdelen op één niveau implementeren – bijvoorbeeld vanaf een triltafel, lopende band of ladingdrager. De metaalverwerkende industrie, de automobielsector, bedrijven in de productietechnologie en logistiek en in de life sciences-sector winnen door het gebruik van de kit aan betrouwbaarheid, procesnauwkeurigheid en hogere output – handmatige, foutgevoelige bediening behoort tot het verleden. Waardevolle menselijke hulpbronnen kunnen worden gebruikt voor complexere en minder eentonige taken. De kit kan gebruikt worden in zowel schone als licht vervuilde productieomgevingen.
In het CoLab, het SCHUNK-robottoepassingscentrum, kan de 2D Grasping Kit uitgebreid getest en gevalideerd worden voor de specifieke toepassing. Zo kan bijvoorbeeld worden vastgesteld hoe betrouwbaar de werkstukken door de camera worden gedecteerd en of de werkstukken betrouwbaar worden opgepakt en neergezet. Bovendien krijgt de klant aanzienlijke ondersteuning bij het uitvoeren van de taak of het aanleren van de eerste werkstukken. Dit maakt het veel gemakkelijker om de juiste oplossing op maat te vinden voor de toepassing, waardoor de risico’s tot een minimum worden beperkt en de invoering van de automatiseringsoplossing wordt versneld.
Dit artikel delen op je eigen website? Geen probleem, dat mag. Meer informatie.

IndustrieVandaag is een onafhankelijk platform met het laatste nieuws van vandaag over de procesindustrie, industrial processing, productie industrie, maakindustrie en elektronica industrie.
Neem contact met ons op:
Tel +31 (0)23 737 07 63
Email via contactpagina










