Door: redactie - 4 juli 2025 |
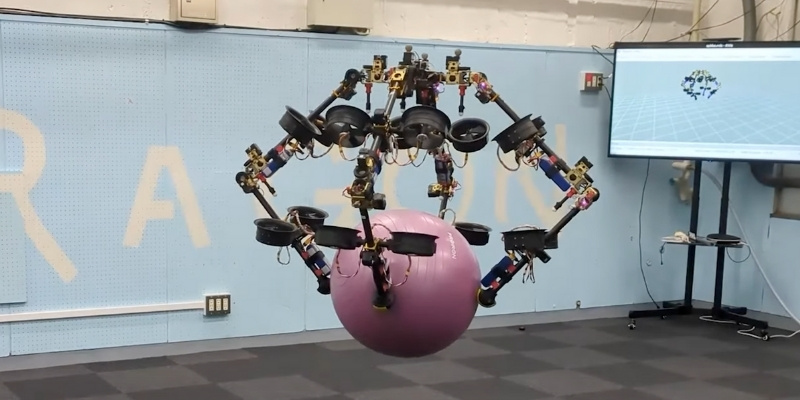
Een opmerkelijke ontwikkeling in de robotica komt uit Japan, waar onderzoekers van de Universiteit van Tokio de SPIDAR robot hebben onthuld. Deze vierpotige robot, die zowel kan lopen als vliegen, markeert een nieuwe stap in de evolutie van multimodale machines. Met geavanceerde technologieën voor stuwkracht en balans biedt de SPIDAR robot een fascinerend kijkje in de mogelijkheden van hybride beweging.
In de afgelopen tien jaar hebben robots die zowel kunnen lopen als vliegen flinke vooruitgang geboekt. Vooral robots met meerdere poten springen eruit, dankzij hun vermogen om over ruw terrein te navigeren en objecten te manipuleren. De SPIDAR robot, ontwikkeld door een team uit Tokio, past perfect in deze trend. Deze vierpotige machine is uitgerust met vectorbare rotoren in elk segment, waardoor hij zich zowel kruipend als vliegend kan voortbewegen.
Hoewel eerdere ontwerpen al eenvoudige vluchten en statisch lopen mogelijk maakten, worstelden ze met complexe bewegingen en energieverbruik. Een specifiek probleem voor de SPIDAR robot is de aerodynamische interferentie tussen verticaal geplaatste rotoren, wat de stabiliteit tijdens het vliegen en grijpen van objecten bemoeilijkt. Om dit aan te pakken, ontwikkelde het team een slimme optimalisatietechniek die de grenzen van rotorvectoring vaststelt en zo storingen minimaliseert.
De constructie van de SPIDAR robot is symmetrisch, met vier poten die elk uit twee segmenten bestaan, verbonden door draaiende gewrichten. Dankzij rotoren die in alle richtingen kunnen kantelen, kan de robot de kracht en richting van de luchtstroom aanpassen. Dit maakt zowel kruipen als vliegen mogelijk. Elke rotor gebruikt twee tegenroterende propellers om ongewenste draaiing te voorkomen, en twee motoren zorgen voor de kanteling.
Toch brengt deze innovatieve opzet ook problemen met zich mee. De lichte romp en zwakke servomotoren maken het lastig om voldoende kracht te leveren voor complexe bewegingen. Bij het kruipen, waarbij beide poten tegelijk bewegen zonder de romp te tillen, ontstaan balansproblemen. Het team bedacht een strategie voor stuwkrachtcontrole om zwaartekracht te compenseren, wat de stabiliteit en efficiëntie aanzienlijk verbetert.
De besturing van de SPIDAR robot richt zich op het zwaartepunt om bewegingen te sturen. Door te assumen dat gewrichten langzaam bewegen, wordt de romp als stabiel beschouwd. Een PID-regelaar past de hoek en kracht van elke rotor aan om een stabiele houding te behouden. Daarnaast zorgt een optimalisatieproces ervoor dat de energie binnen de motorlimieten efficiënt wordt gebruikt.
Tijdens het kruipen ondersteunt de robot zijn gewicht met rotoren, terwijl de poten voorzichtig worden opgetild. Om balans te houden wanneer alle poten van de grond zijn, berekent het systeem de ideale verhouding tussen rotorstuwkracht en gronddruk. Deze hybride aanpak stelt de robot in staat om zowel voorzichtig te kruipen als stabiel te vliegen, een indrukwekkende prestatie in gecontroleerde tests.
In praktijktests toonde de SPIDAR robot stabiel kruipen en vliegen, zelfs met complexe gewrichtsbewegingen. Vooral ontwerpen met drie poten lieten goede controle zien tijdens vluchten onder verschillende omstandigheden. Bij kruipproeven was de voorwaartse beweging nauwkeurig, maar snelle pootbewegingen en zwakke servos leidden tot instabiliteit. Het gebruik van stuwkracht bleek effectief, en de algemene bewegingscapaciteit werd bevestigd.
Om de instabiliteit bij kruipen te verminderen, wil het team in de toekomst eenvoudige gewrichtsbesturing vervangen door feedback op basis van stuwkracht en gewrichtsdynamiek. Daarnaast staan tests op oneffen terrein, zoals trappen, op de planning. Ook wordt gekeken naar hele-body grijptechnieken om de volledige bewegings- en manipulatietalenten van de robot te demonstreren. Meer details over dit onderzoek zijn te vinden in het wetenschappelijke artikel op arXiv.
Dit artikel delen op je eigen website? Geen probleem, dat mag. Meer informatie.

IndustrieVandaag is een onafhankelijk platform met het laatste nieuws van vandaag over de procesindustrie, industrial processing, productie industrie, maakindustrie en elektronica industrie.
Neem contact met ons op:
Tel +31 (0)23 737 07 63
Email via contactpagina