
Door: Redactie - 22 juli 2022 |
Onderzoekers van het Max Planck Instituut für Intelligente Systeme (MPI-IS) in Stuttgart hebben een robothond ontwikkeld die door middel van een virtueel ruggenmerg continu zijn bewegingspatronen optimaliseert. Deze nieuwe benadering van robotica vindt zijn inspiratie in de biologie, met een bijzondere nadruk op het leerproces van dieren.
Net als pasgeboren dieren zoals een giraf of een veulen, die na hun geboorte de coördinatie van hun poten moeten leren, moet de robothond zijn interne mechanismen onder de knie krijgen. Alle elementen zijn aanwezig, maar het vermogen om alle spieren en pezen efficiënt te gebruiken komt met de tijd. De robothond is ontworpen om zijn bewegingspatronen te optimaliseren via een continu leerproces, waarbij de coördinatie en controle van spieren geoefend worden totdat het systeem in het virtuele ruggenmerg goed is aangepast.
Dit leerproces wordt aangedreven door een Bayesiaans optimalisatie-leeralgoritme. Het algoritme vergelijkt sensorinformatie van de poten van de robothond, de actuele data, met de doeldata van de computer. Het continu aanpassen van de structuur van de bewegingspatronen op basis van deze data stelt de robothond in staat te leren lopen.
Een belangrijk onderdeel van dit systeem is de Central Pattern Generator (CPG), een netwerk van zenuwcellen in het ruggenmerg dat bij mensen en dieren zorgt voor ritmische spiersamentrekkingen. Deze neurale netwerken zijn essentieel voor continue bewegingen zoals lopen, knipperen of de spijsvertering.
In pasgeboren dieren is te zien dat de CPG’s in eerste instantie niet precies genoeg zijn afgesteld. Zolang het jonge dier op een vlakke ondergrond loopt, regelen de CPG’s de bewegingssignalen vanuit het ruggenmerg correct. Echter, bij het tegenkomen van een kleine oneffenheid, treden er reflexen in werking die de bewegingspatronen aanpassen om te voorkomen dat het dier valt.
Deze bewegingssignalen zijn omkeerbaar, of ‘elastisch’. Ze keren na de verstoring terug naar hun oorspronkelijke configuratie. Wanneer het dier echter ondanks de actieve reflexen over meerdere bewegingscycli blijft struikelen, moeten de bewegingspatronen opnieuw en onomkeerbaar, of ‘plastisch’, worden aangeleerd.
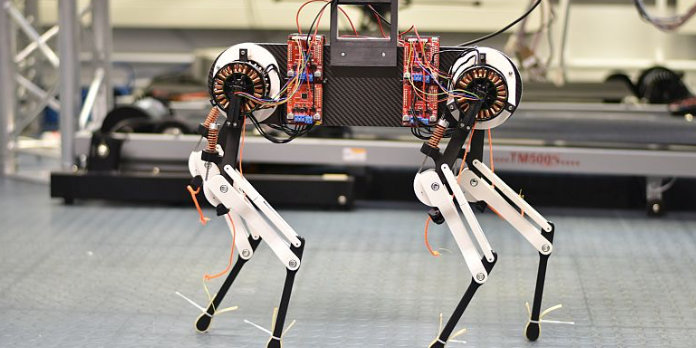
Voor de robothond, genaamd ‘Morti’, geldt hetzelfde principe. Morti kan zijn bewegingspatronen echter veel sneller optimaliseren, namelijk in ongeveer een uur. Zijn CPG wordt gesimuleerd in een kleine lichte computer. Gedurende dat uur worden de gegevens van de sensoren die aan zijn poten zijn bevestigd voortdurend vergeleken met de CPG-signalen. Als Morti struikelt, verandert het leeralgoritme de beenbewegingen, zoals de zwaaisnelheid, het zwaairitme en de tijd dat een been op de grond blijft.
Aangepaste beenbewegingen beïnvloeden de mate waarin de robothond zijn interne mechanismen effectief kan gebruiken. Naarmate het algoritme de bewegingspatronen aanpast, stuurt de CPG aangepaste signalen uit, wat leidt tot een betere loopstabiliteit.
Naast de bewegingsoptimalisatie heeft Morti nog een ander voordeel: energie-efficiëntie. De computer die Morti’s CPG simuleert, verbruikt slechts 5 Watt aan energie. Ter vergelijking, andere robotconstructies van bekende fabrikanten verbruiken meestal tientallen tot enkele honderden Watts aan elektriciteit. Ondanks hun dynamische en efficiënte werking is het energieverbruik van het model van MPI-IS dus aanzienlijk lager.
De ontwikkeling van deze robothond biedt ook waardevolle inzichten in de anatomie van dieren. Hoewel onderzoekers het ruggenmerg van een levend dier niet kunnen bestuderen, kunnen ze het wel modelleren in de robothond. Dit brengt ons een stap dichter bij het begrijpen van hoe reflexen en CPG’s in dieren samenwerken om beweging te leren.
Dit interdisciplinaire onderzoek op het snijvlak van robotica en biologie is fundamenteel en biedt antwoorden op vragen die de biologie alleen niet kan beantwoorden. Het model van de robothond belooft in de toekomst nog meer waardevolle inzichten te leveren. Het project vormt een grote stap voorwaarts in de ontwikkeling van geavanceerde robots, en de robothond is een perfect voorbeeld van hoe we van de natuur kunnen leren om de technologie te verbeteren.
Dit artikel delen op je eigen website? Geen probleem, dat mag. Meer informatie.

IndustrieVandaag is een onafhankelijk platform met het laatste nieuws van vandaag over de procesindustrie, industrial processing, productie industrie, maakindustrie en elektronica industrie.
Neem contact met ons op:
Tel +31 (0)23 737 07 63
Email via contactpagina










